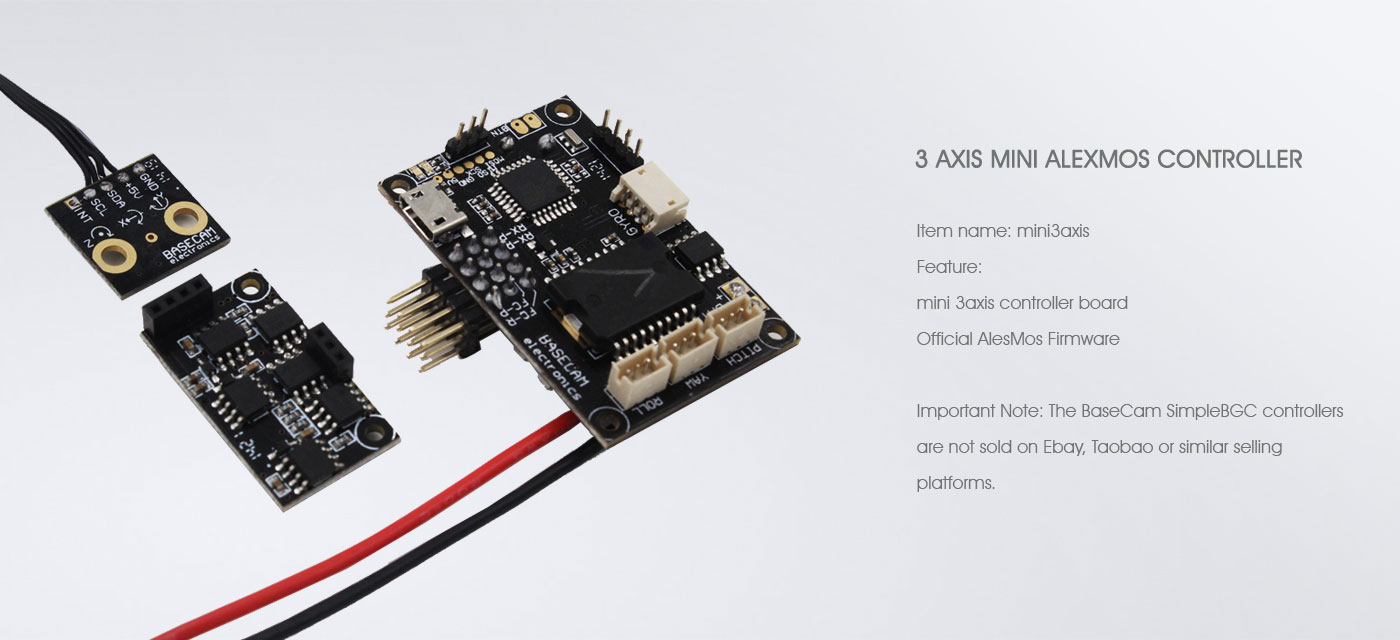
Important Note: The BaseCam SimpleBGC controllers are not sold on Ebay, Taobao or similar selling platforms.
Item No.: Mini 3axis
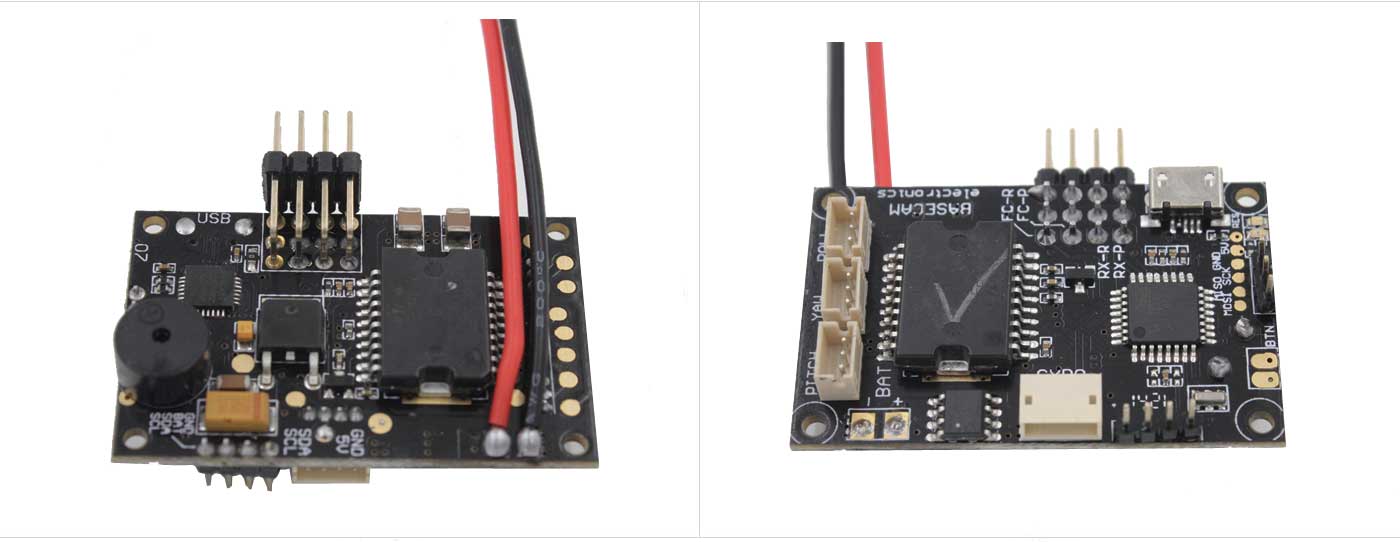
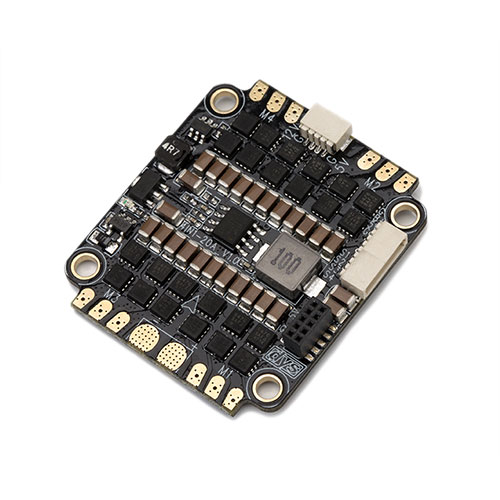
In order to work with more small gimbal, we design a mini controller and have the stock now.
The main board size is: 46.6x30mm
And size of Sensor is same as before
For the updated firmware to download link as below:
http://www.simplebgc.com/eng/downloads/
Here is changelog compared to 2.2 version:
v.2.3b5
● Bug fixed: multiple YAW turns caused variable overflow and instability
● Bug fixed: if the system starts in the YAW lock mode, the camera can accidentally rotate to fixed angle.
● If Flight Controller (EXT_FC) is connected and calibrated, the system becomes more stable in the bigger range of inclination angles (even pitched +-80 degrees)
● Battery monitoring and buzzer:
● Voltage drop compensation (PID becomes stable during whole battery lifecycle)
● Low-Voltage alarms and motor cut-off
(This feature will be supported on some newest boards or old ones with the hardware mod: voltage divider 33k/10k connected to pin 19 and active buzzer connected to pin 32. See
user manual for details (coming soon)
● RC mapping improved: Any of PWM, Sum-PPM, or Analog modes may be set for any of RC inputs separately.
● it lets to use YAW-encoder or joystick together with RC control or External Flight Controller
● it may be required to re-configure RC inputs after firmware upgrade.
● Serial API extended by the C command (camera control). Example written in C++ for Arduino is provided in doc
● (GUI) New Full-screen mode available to better fit GUI in small displays
● (GUI) Bug fixed: firmware upgrade fails if working path contains spaces